前言
先看以下乐馨官方的 ESP32S3 和 ESP32C3 的对比
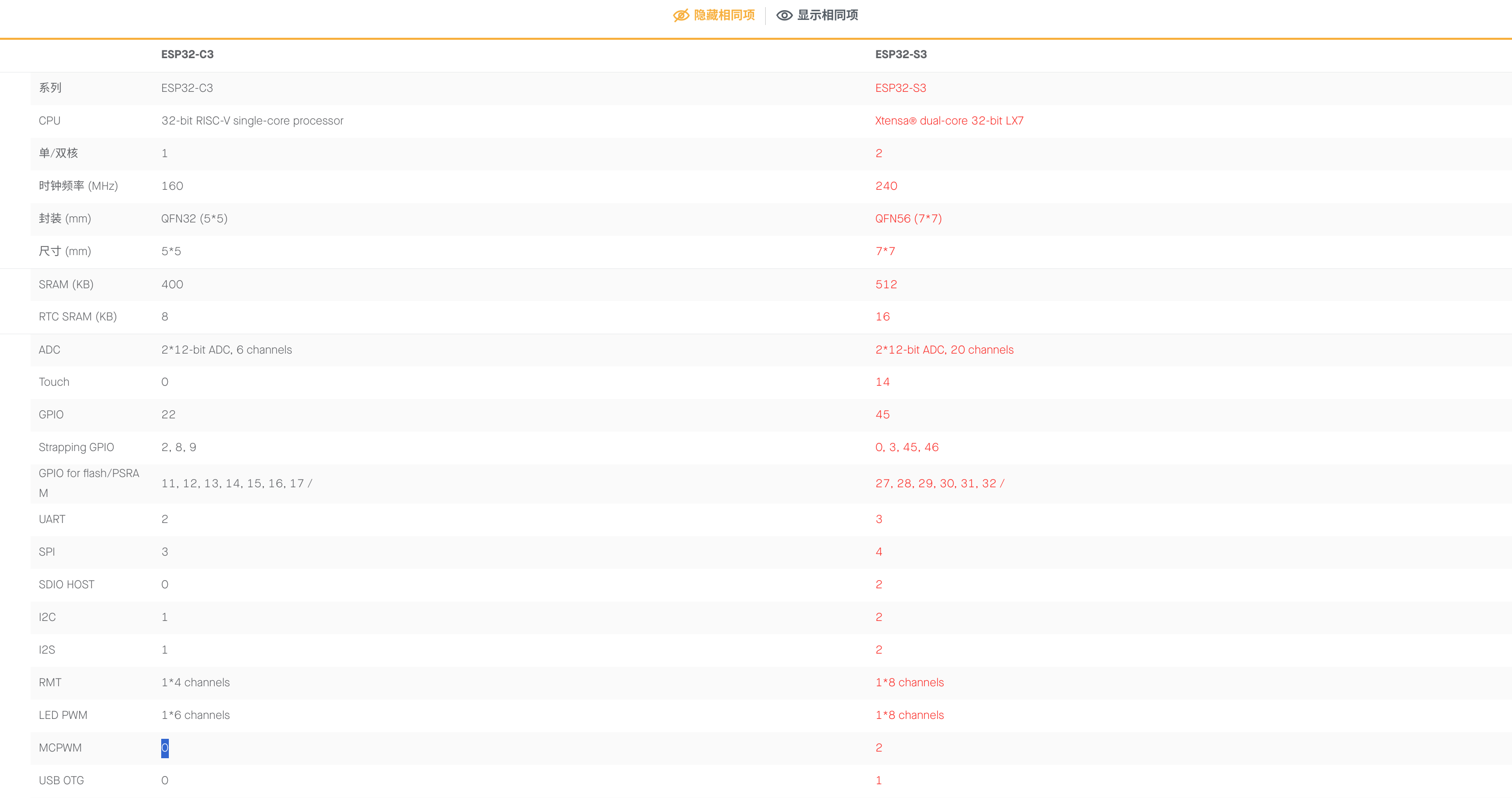
很明显,ESP32C3 缺乏 MCPWM 设备。
所谓 MCPWM, 就是专门为产生svpwm设计的电路。他能产生6路互补的PWM信号,并且实现中央对齐。然后还能实现在PWM信号的特定位置产生同步事件。app据此可以在这个同步事件上实现电流采样。
一度我以为 ESP32C3 是无法用于驱动电机的。
直到一次偶然,我看到 SimpleFOC 的论坛里有人提到要支持 ESP32C3。我在想,这C3不是没MCPWM么? SimpleFOC咋支持?
事实是,SimpleFOC 也确实不支持 C3。但是有人回复他实现过。就用的 LEDC PWM。
要知道,ESP32C3 可比 S3 便宜了一半还多。要真的能驱动电机,那我的 VVVF 变频器大业,又多了一项可选的MCU!
实践
虽然别人有提过他用 LEDC PWM 实现了 foc。但是吧,无代码无真相。但是总归人家说可以。那我研究研究吧。于是购入 ESP32S3。
等等,不是说C3吗?咋买了S3呢?因为我确信我的VVVF需要蓝牙!需要WIFI!AT32F415已经不能满足我的需求了。
然后顺便买了个9.9的 ESP32C3开发板。
等开发板到了,我马上研究起了 ESP32C3。虽然C3是顺便买的,但是不妨碍我先研究它。
于是在项目里创建了 lib/libvfd/hal/esp32c3pwm.{hpp,cpp} 文件。
着手研究 ESP32C3 里的 LEDC PWM。
最后踩了无数的坑后,把他实现出来了。
#if defined(ESP_PLATFORM)
#ifdef CONFIG_IDF_TARGET_ESP32C3
#include "esp32c3pwm.hpp"
#include "driver/ledc.h"
#include "esp_err.h"
#include "esp_timer.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "freertos/timers.h"
#include "private/commons.hpp"
#include "os/os.hpp"
#define FOC_MCPWM_TIMER_RESOLUTION_HZ 40000000 // 40MHz, 1 tick = 0.025us
#ifndef INVERT_LOW_SIDE
#define INVERT_LOW_SIDE 0
#endif
const static char* TAG = "vfd";
namespace motorlib
{
struct esp32c3pwmdriver_impl
{
/*
* Prepare and set configuration of timers
* that will be used by LED Controller
*/
ledc_timer_config_t timer_config = {
.speed_mode = LEDC_LOW_SPEED_MODE, // timer mode
.duty_resolution = LEDC_TIMER_13_BIT, // resolution of PWM duty
.timer_num = LEDC_TIMER_0, // timer index
.freq_hz = 4000, // frequency of PWM signal
.clk_cfg = LEDC_AUTO_CLK, // Auto select the source clock
};
int gen_gpios[6]; // 3 GPIO pins for generator config
// hardware variables
int pwm_frequency;
int pwm_period;
esp32c3pwmdriver_impl(
int pin_AH, int pin_AL, int pin_BH, int pin_BL, int pin_CH, int pin_CL, int PWM_freq)
: pwm_frequency(PWM_freq)
{
gen_gpios[0] = pin_AH;
gen_gpios[1] = pin_BH;
gen_gpios[2] = pin_CH;
gen_gpios[3] = pin_AL;
gen_gpios[4] = pin_BL;
gen_gpios[5] = pin_CL;
// ledc_timer_config.duty_resolution = ledc_find_suitable_duty_resolution(LEDC_USE_XTAL_CLK, pwm_frequency);
pwm_period = 1 << timer_config.duty_resolution;
// pwm_frequency = timer_config.freq_hz;
esp_err_t ret;
ledc_timer_rst(LEDC_LOW_SPEED_MODE, LEDC_TIMER_0);
ret = ledc_timer_config(&timer_config);
timer_config.timer_num = LEDC_TIMER_1;
ret = ledc_timer_config(&timer_config);
os::printf("ledc_channel_config return %d\n", ret);
ledc_channel_config_t ledc_channel[] = {
{
.gpio_num = pin_AH,
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LEDC_CHANNEL_0,
.timer_sel = LEDC_TIMER_0,
.duty = 1,
.hpoint = 0,
.flags = { .output_invert = 0 },
},
{
.gpio_num = pin_BH,
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LEDC_CHANNEL_1,
.timer_sel = LEDC_TIMER_0,
.duty = 1,
.hpoint = 0,
.flags = { .output_invert = 0 },
},
{
.gpio_num = pin_CH,
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LEDC_CHANNEL_2,
.timer_sel = LEDC_TIMER_0,
.duty = 1,
.hpoint = 0,
.flags = { .output_invert = 0 },
},
{ .gpio_num = pin_AL,
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LEDC_CHANNEL_3,
.timer_sel = LEDC_TIMER_1,
.duty = 1,
.hpoint = 0,
.flags = { .output_invert = !INVERT_LOW_SIDE } },
{ .gpio_num = pin_BL,
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LEDC_CHANNEL_4,
.timer_sel = LEDC_TIMER_1,
.duty = 1,
.hpoint = 0,
.flags = { .output_invert = !INVERT_LOW_SIDE } },
{ .gpio_num = pin_CL,
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LEDC_CHANNEL_5,
.timer_sel = LEDC_TIMER_1,
.duty = 1,
.hpoint = 0,
.flags = { .output_invert = !INVERT_LOW_SIDE } },
};
for (int ch = 0; ch < 6; ch++)
{
ret = ledc_channel_config(&ledc_channel[ch]);
os::printf("ledc_channel_config return %d\n", ret);
}
stop();
}
void set_duty(float_number U_a, float_number U_b, float_number U_c)
{
auto u_lpoint = clamp<int>(U_a * pwm_period, 0, pwm_period-1);
auto v_lpoint = clamp<int>(U_b * pwm_period, 0, pwm_period-1);
auto w_lpoint = clamp<int>(U_c * pwm_period, 0, pwm_period-1);
ledc_set_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_0, u_duty);
ledc_set_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_1, v_duty);
ledc_set_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_2, w_duty);
ledc_set_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_3, u_duty);
ledc_set_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_4, v_duty);
ledc_set_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_5, w_duty);
ledc_update_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_0);
ledc_update_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_1);
ledc_update_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_2);
ledc_update_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_3);
ledc_update_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_4);
ledc_update_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_5);
}
void set_frequency(int freq)
{
if (freq <= 6000 && freq >= 3000)
{
ledc_set_freq(LEDC_LOW_SPEED_MODE, LEDC_TIMER_0, freq);
ledc_set_freq(LEDC_LOW_SPEED_MODE, LEDC_TIMER_1, freq);
pwm_frequency = freq;
esp_timer_restart(hr_timer, 1000000/freq);
}
}
void stop()
{
ledc_stop(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_0, 0);
ledc_stop(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_1, 0);
ledc_stop(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_2, 0);
ledc_stop(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_3, 0);
ledc_stop(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_4, 0);
ledc_stop(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_5, 0);
}
void start() { }
int get_frequency() { return pwm_frequency; }
pwmdriver::timer_fn pwm_cb;
static void timer_cb(void* user_data)
{
auto _this = reinterpret_cast<esp32c3pwmdriver_impl*>(user_data);_this->pwm_cb(_this->pwm_frequency);
}
esp_timer_handle_t hr_timer;
void link_timer(pwmdriver::timer_fn fn)
{
pwm_cb = fn;
esp_timer_create_args_t timer_arg = {
.callback = timer_cb,
.arg = this,
.dispatch_method = ESP_TIMER_TASK,
.name = "pwm_tmr",
.skip_unhandled_events = true,
};
esp_timer_create(&timer_arg, &hr_timer);
// 200us = 5khz pwm
esp_timer_start_periodic(hr_timer, 200);
}
~esp32c3pwmdriver_impl()
{
esp_timer_stop(hr_timer);
esp_timer_delete(hr_timer);
}
};
//////////////////////////////////////////////////////////////////////////////
esp32c3pwmdriver::esp32c3pwmdriver(
int pin_AH, int pin_AL, int pin_BH, int pin_BL, int pin_CH, int pin_CL)
{
impl = new esp32c3pwmdriver_impl(pin_AH, pin_AL, pin_BH, pin_BL, pin_CH, pin_CL, 4000);
}
esp32c3pwmdriver::~esp32c3pwmdriver()
{
delete impl;
}
// Function setting the duty cycle to the pwm pin (ex. analogWrite())
// - BLDC driver - 6PWM setting
// - hardware specific
void esp32c3pwmdriver::set_duty(float_number U_a, float_number U_b, float_number U_c)
{
impl->set_duty(U_a, U_b, U_c);
}
void esp32c3pwmdriver::start() { impl->start(); }
void esp32c3pwmdriver::stop() { impl->stop(); }
int esp32c3pwmdriver::get_frequency() { return impl->get_frequency(); }
void esp32c3pwmdriver::set_frequency(int f) { impl->set_frequency(f); }
void esp32c3pwmdriver::link_timer(timer_fn fn) { impl->link_timer(fn); }
}
#endif // CONFIG_IDF_TARGET_ESP32C3
#endif // defined(ESP_PLATFORM)
不同于其他平台使用 PWM 自身的定时器中断,esp32c3 上,pwm 周期更新的回调是由一个高精度定时器回调提供的。之所以不用 pwm 的回调,是因为 ledc pwm 并不会产生这样的中断——除非使用了硬件fade功能。 但电机控制岂是fade能瞎fade的?
运行
实际上,由于实现的仓促。这个pwm输出总觉得不是很靠谱。不过当我怀着忐忑的心情,准备报废掉一个耗资300 大洋让JLC打样贴片的驱动版的时候。。。奇迹发生了。电机转起来了。
不过,因为支持的pwm频率很有限,导致无法用电机播放《世上只有妈妈好了》。
当然,之前的驱动板播放的音乐可以猛戳这里看。
Comments