感应电机的开环控制
在没有使用变频器的时候,感应电机无法调速。交流电改变频率虽然困难,但是改变电压很容易。 因此也有通过自耦变压器调压后驱动感应电机的方法。
但是仅仅是降低了电压,扭矩降低导致转差变大。转差变大使得转子发热增加。不利于电机的长期稳定运行。
所以有了 恒压频比的开环变频调速器。注意,这个词的分词应该是 恒 压频比。
意思是以固定的 频率和电压的比值进行调速。比如一个额定 220v/50hz 的电机,当试图降一半转速运行的时候,可以设定逆变器输出 110v/25hz 给电机。
恒压频比是一种开环控制。控制器只是盲目的输出一个设定的电压和频率。但是并不能让电机工作在最佳的特性点上。
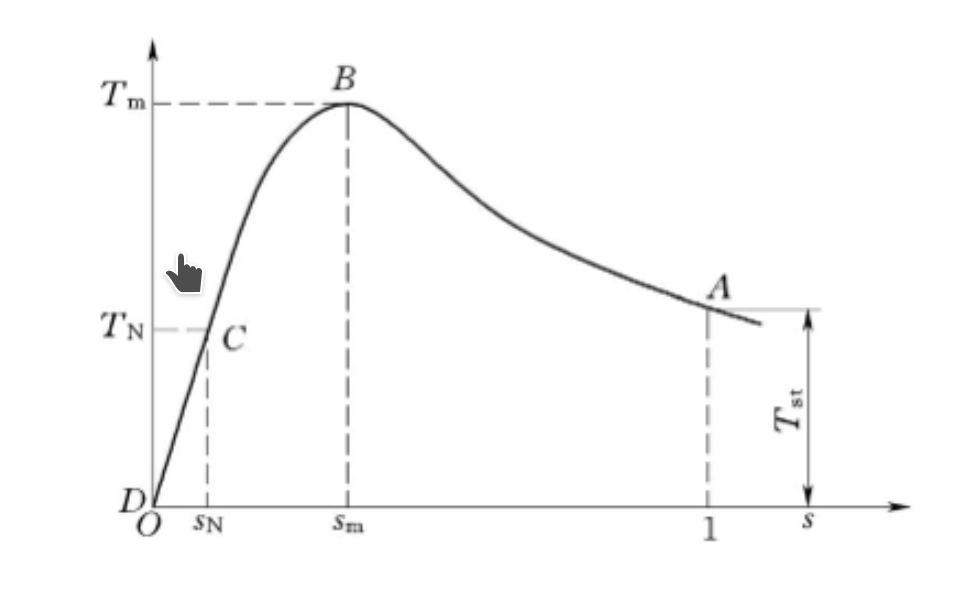
图中,恒坐标是转差率,纵坐标为扭矩。B 点就是电机的最佳工作点。但是电机遇到扰动的时候,很容易进入 B-A 区间。 因此,实际会尽量让电机工作在 B-C 区间,并靠近 B 点。
Tm 的值表示电机的最大扭矩,电机的最大扭矩正比于电压的平方。
因此,可以看出,使用恒压频比控制,并不能很好的让电机工作在最佳状态。
所以就得出了在电动汽车领域更常见的做法:
转差率闭环控制
既然电机的最大扭矩取决于电压,那只要知道了电机的转速,控制逆变器输出的频率,让电机始终工作在最大扭矩上。意味着在相同的转速和扭矩输出下(即相同的机械功率输出下)。闭环控制的逆变器始终会比恒压频比的控制器输出更低的电压。于是使得电机吸收的电功率跟小,也就是机械效率更高。
怎么知道电机的转速呢?
常规做法,是使用转速传感器。有了转速传感器,就可以进行基于转差率的闭环控制。知道电机转速后,可以立马获得当前输出频率。输出电压设定为 min(恒压频比计算出来的频率, 用户设定的扭矩电压)
也就是随着转速的提升逐步提高电压,并在达到最大电压后停止电压攀升。如果电机扭矩还有富裕(负载较低)则电机电压不再提升的情况下,频率会继续提升,也就是进入弱磁控制状态。可以榨干电机的机械潜力。
转差率闭环控制下,异步电机的特性就更贴近于直流电机了。通过调节电压可以轻松的控制扭矩,而频率则通过闭环控制自动跟踪。控制器输出电流频率,正比于电机转速,和同步电机异曲同工之妙。只是不需要控制电流相位。
无转速传感器无参数设定的闭环控制
转速传感器不仅仅提高了整个系统的成本,而且降低了电机的可靠性。因为异步电机工作环境通常较为恶劣。也正是因为恶劣环境下必须选择结构较为简单的异步电机。
所以,如果能使脱离转速传感器,但是依旧使用闭环控制,则能同时兼具开环控制的低成本优势和闭环控制的高效率优势。
前人提出了不少方式,但是这些方式有一个共同特点:需要异步电机的各项参数。 如绕组电感,绕组电阻,额定转差率。
事实上,额定转差率是一个更为难获取的数值。其实使用转速传感器进行闭环控制的时候,也需要这个参数。这也是为何闭环控制器,通常和电机绑定。而市面上普遍单独售卖的变频器,都是开环控制。
因此,如何让变频器可以同直流电机控制器一样,无需设定电机参数,就能自动获得和直流电机一样(或者接近)的控制特性呢?
于是,经过我长期的思考,我得出了一个解决方案:
最大功率因素点跟踪
交流电机在运行过程中,不同的运转状态下,会产生不同的功率因素。
例如,电机堵转运行的时候,绕组的表现为纯电感。于是功率因素接近 0, ,但是电机要从电网汲取超大的电流。这些超大的电流最后都通过电线的电阻发热损耗掉了。
电机在空载运行的时候,绕组表现依旧为纯电感。功率因素依旧接近 0 。 但是因为此时转子转速接近同步转速,因此电机产生的反电动势抵消了外部的驱动电压。空载运行时,电机反电动势会极为接近驱动电压。因此电流处于最小值。绕组实际电压为 驱动电压-反电动势电压。然后电流为此时电压下的电感电流。
而电机正常的处于额定负载的情况下,会产生最大的功率因素。负载低于和高于额定负载,都会使电机的功率因素下降。
因此,只要寻找到让电机功率因素最大的 频率/电压 组合,就可以在不知晓电机各项参数的情况下,获得接近直流电机般的转矩特性。
而最大功率因素点跟踪,其思路就来自 太阳能控制器的最大功率点跟踪。
具体做法是。使用 恒压频比,设定一个初始的频率。而算法的输出,为对初始频率的修正数。
算法的观测器,为 功率因素。功率因素的获取方式很简单,就是通过电流采样,获取三相各自的电流值。将电流值与此时逆变器的输出电压比较,就可以获得电流相对电压的滞后角。通过滞后角,就得到了功率因素。
此时算法会尝试 减少或者增加频率,然后观察功率因素的变化方向。 如果功率因素的变化方向,和频率的修正数同向,则电机目前工作在轻载模式。需要继续增加频率。
如果功率因素的变化方向,和频率的修正数逆向,则电机工作在重载模式。需要降低频率。
这样经过双向的尝试,控制器很快就能稳定在使功率因素最大的频率上。
Comments